
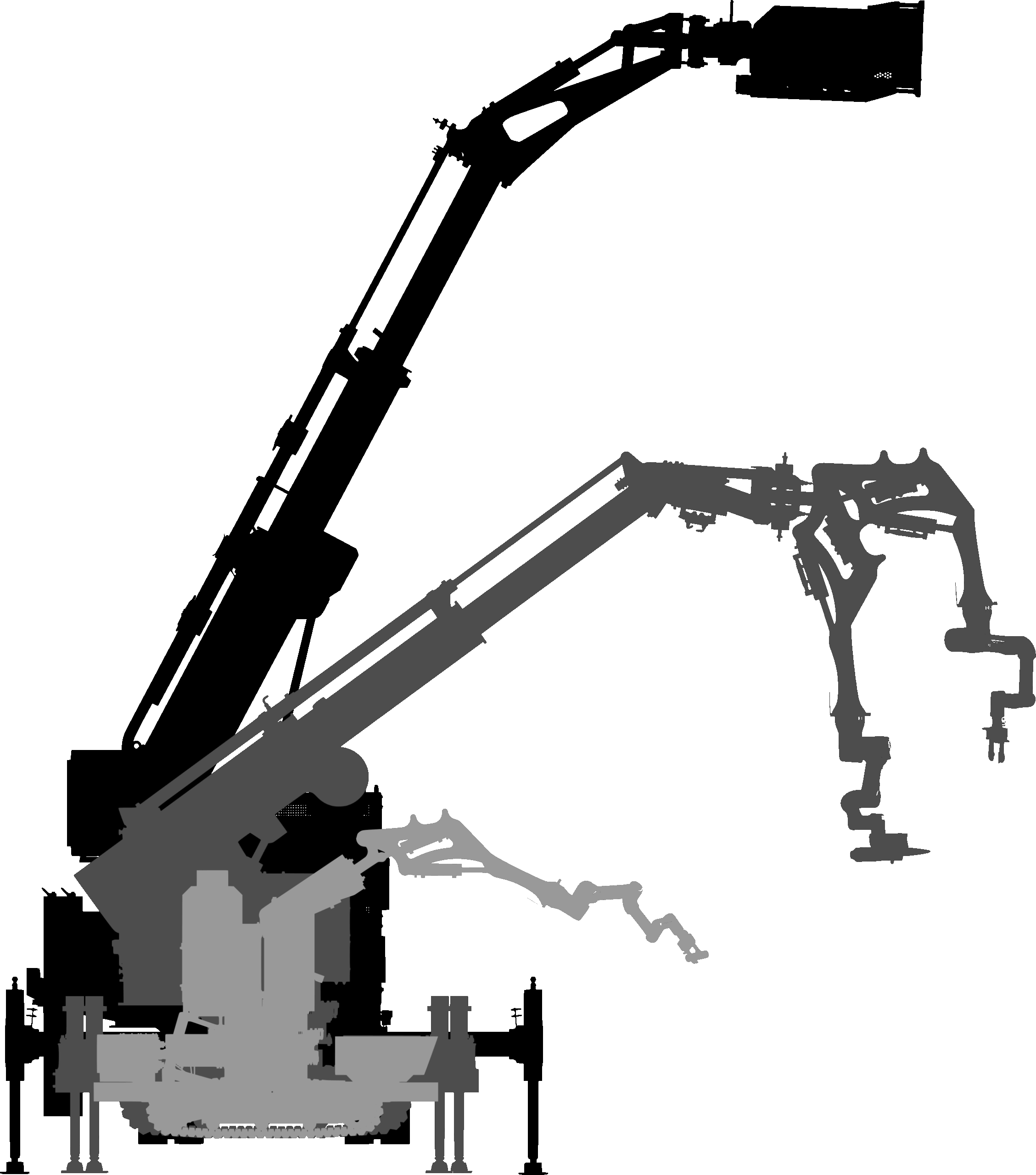
Barrnon’s B-IDP™ platform architecture is a modular, productised reconfigurable system for nuclear decommissioning tasks applicable across a wide range of environments.
All elements of the B-IDP™ platform share a common mechanical and electrical / software interface, enabling rapid exchange of booms, arms, tools and sensors, and are fully compatible with our modular software, LiDAR and VR-based workflows.
The BBX Series provides scalable deployment options from confined-space work to heavy cutting operations. All models share identical interfaces and integrate with Barrnon’s BARRIER® containment system.
Prismatic electro-hydraulic booms extend reach for access to concrete structures, voids and steelwork.
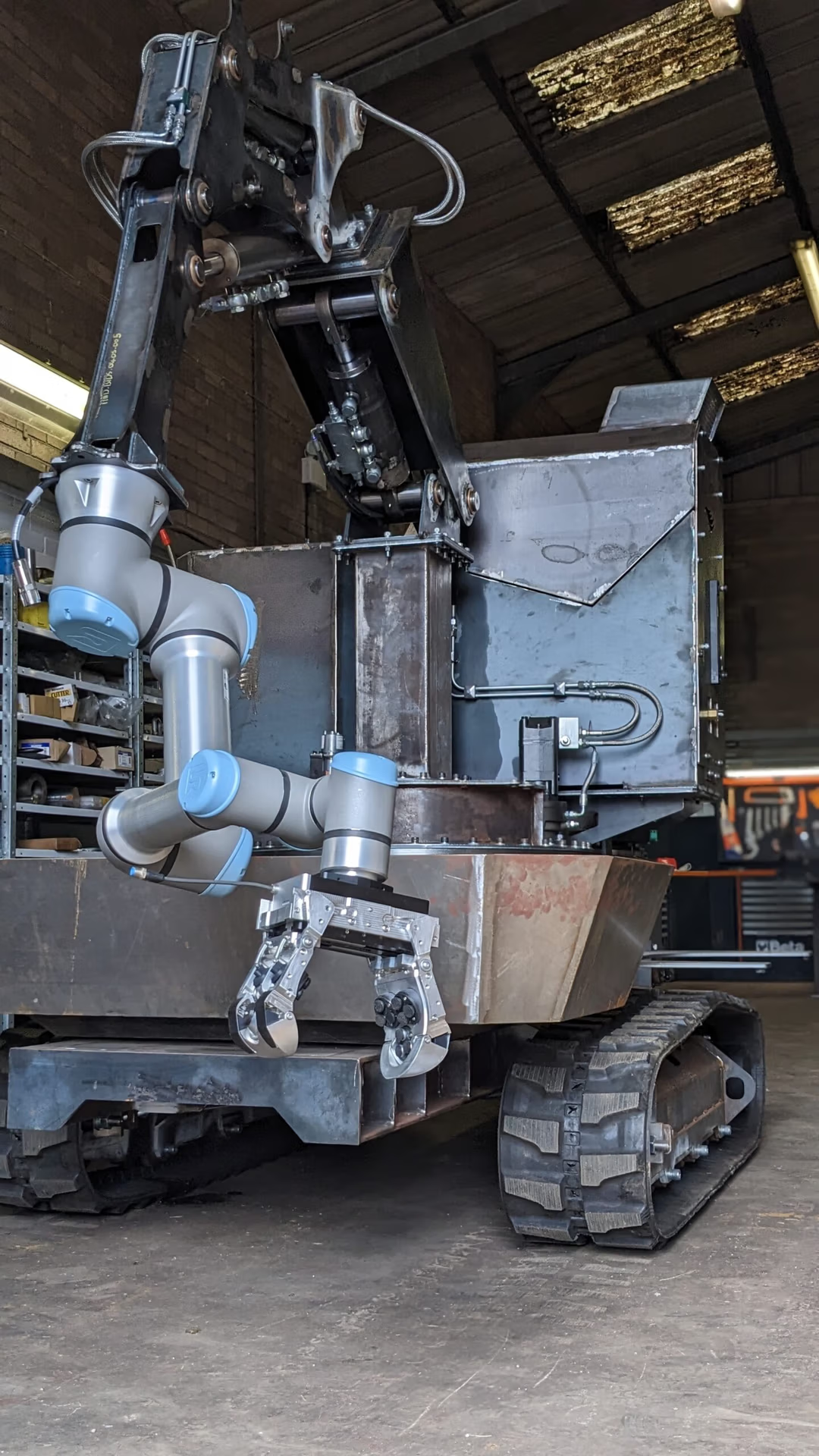
Electro-hydraulic arms mount directly to BBX platforms or to boom tips to support controlled multi-axis cutting, gripping and inspection.
A standardised plug-and-play mechanical/electrical interface enables rapid integration of end-effectors and instrumentation.
Options include:
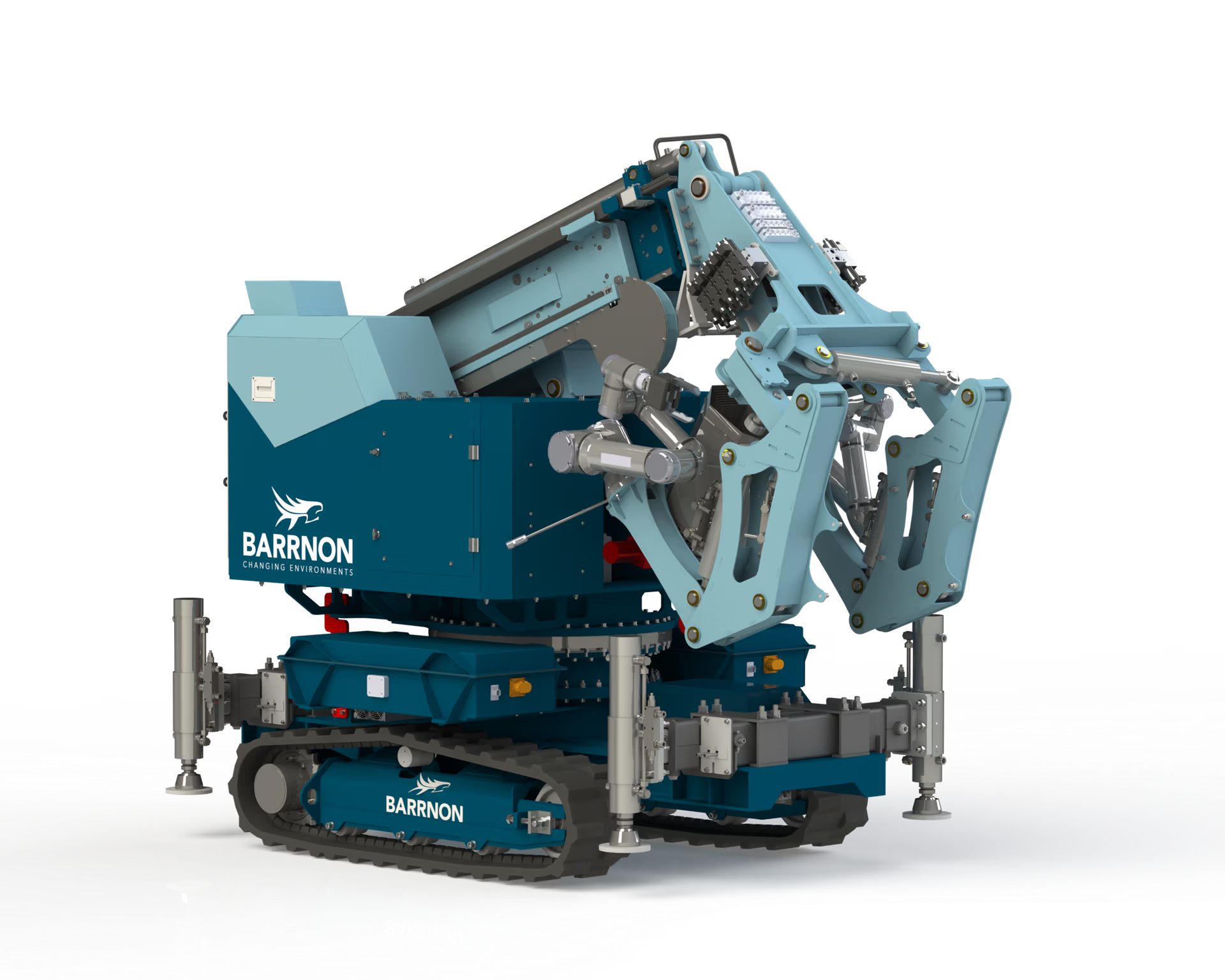
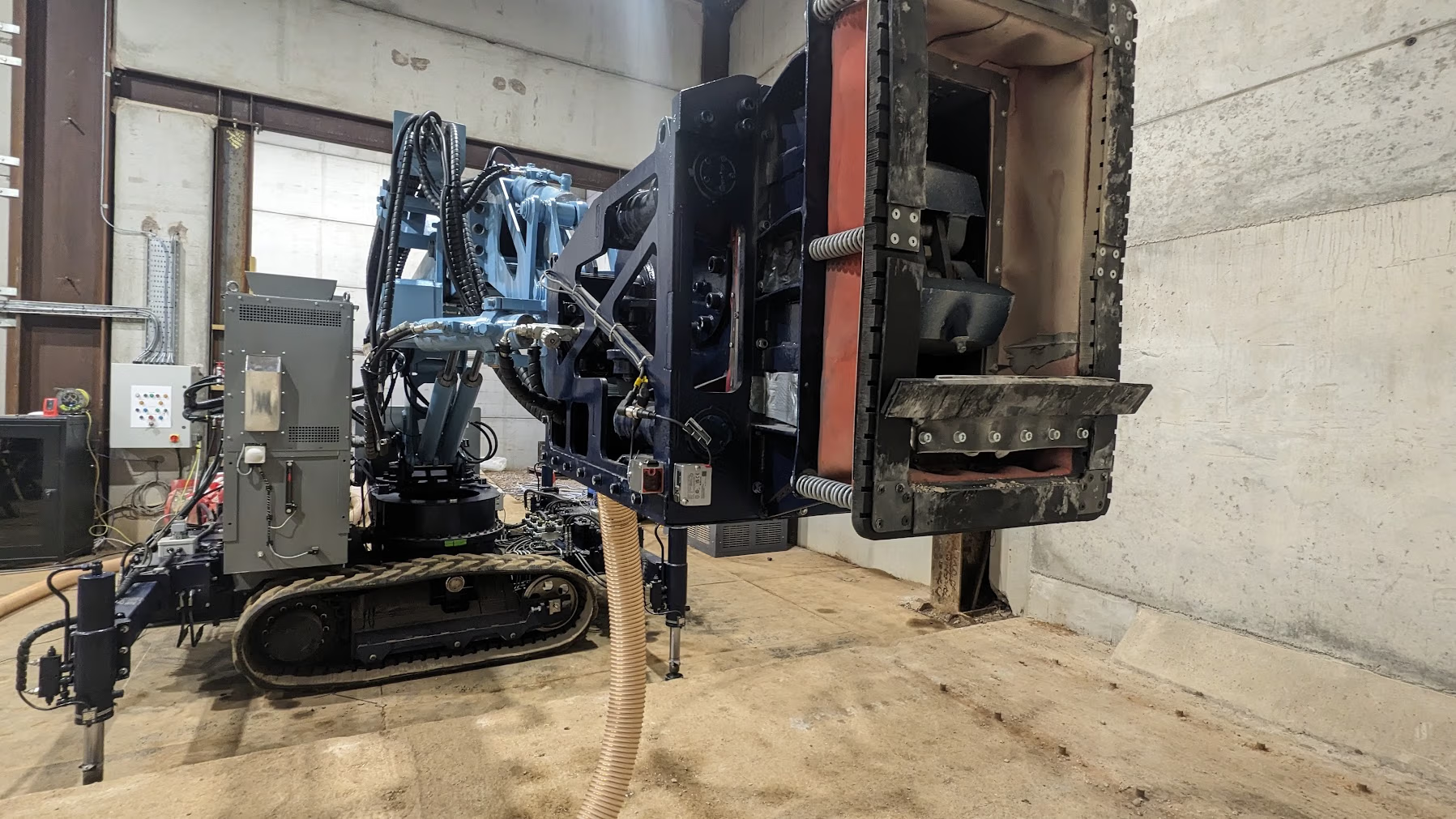
Barrnon delivers modular decommissioning robotics built for the harshest environments in the nuclear industry. Many elements of the B-IDP™ platform — including BIDS™, the WHV and the Scabbler — have already been designed, manufactured and deployed for Sellafield Ltd and NRS Dounreay, demonstrating high technology readiness and field-proven reliability.
At the heart of B-IDP™ is a productised system architecture. Core modules — base platforms, booms, manipulators and tools — share common mechanical, electrical and software interfaces. This enables Barrnon to combine high-TRL components into new configurations, rapidly tailoring solutions to site-specific challenges while minimising technical risk and development time.
All robotic platforms are CE marked and engineered for remote operation in high-hazard environments. Designs can be supplied as ready-to-build packages or customised to client requirements, including battery-powered, umbilical-free or enhanced-safety variants for interlocked control.
Platform selection depends on the operational envelope, including:
Barrnon delivers decommissioning robots for the harsh environments of the nuclear industry. BIDS and the WHV were developed for Sellafield ltd, and the Scabbler for NRS Dounreay, each with potential use cases in other difficult to access sites around the UK and the globe. The Barrnon team create fully CE marked robotic decommissioning platforms, and remotely operated demolition robots. A range of deployable tools and end effectors are available based on client specification.
Barrnon provides, ready to build designs, that can be customised upon demand. Battery powered and umbilical free options are available, as well as enhanced safety adaptions for operator interlocking control.
The choice of ROV depends on client circumstances such as:
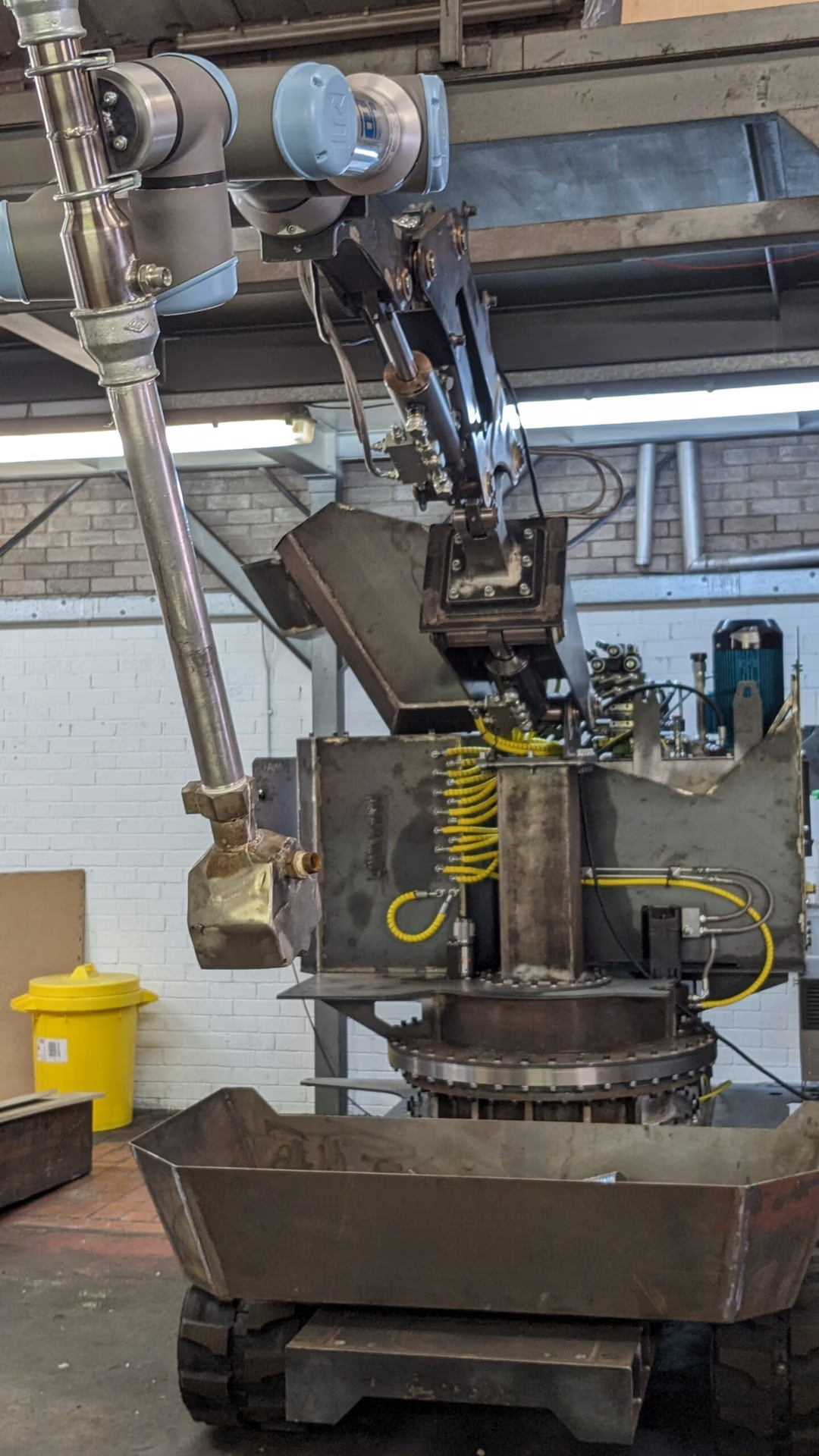
Suite of swapable end effectors available for every situation:
The modularity of Barrnon’s ROV’s (Remotely Operated Vehicles) ensure that all sub-assemblies can be easily swapped out and replaced for maintenance or at the end of its life. Several tools have already been developed and can be modified to suit the required applications:

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}